By Carlos Cuevas Garcia, TUM
Living labs and testbeds are key research sites for SCALINGS. These are places where new technologies and ways of living are tested and further designed. While it might be obvious that a testbed for autonomous vehicles looks more or less like a road, what a testbed or a living lab for robots is meant to look like is a bit harder to imagine.
In the SCALINGS project we have looked for and looked at several living labs and testbeds where robots are being put into test. Team members have visited robotics testbeds in Spain, Germany, the United Kingdom, and Italy.
Some of these are facilities within research departments that have been there for about a decade, others are ensembled for short periods of time of about a week, and other ones are spaces that form part of the city infrastructure and only for a short period of time are they called a testbed or a living lab. It all depends on what exactly the robot is meant to do, and therefore what a testbed/living lab is there for. The truth is that robots are highly complex technologies and several different elements could be put into test, either together or at different times.
Below I describe briefly a couple of robot living lab/testbed examples.
A real sewer
Some sections of the sewage system of Barcelona were turned into a testbed for inspection robots in early stages of their development, funded by the programme European Commission and the project ECHORD++, under a scheme called Public End-User Driven Technology Innovation (PDTI). In order for the sewer to become a testing scenario, sewage workers had to come early in the morning to remove excessive amounts of dust and spiderwebs before the tests started. One side of the road was blocked with a car from the Ajuntament de Barcelona and with security barriers to avoid anybody running over robot developers, sewer inspectors, and curious people getting close to take a look. A second manhole far from the street was a more convenient area to bring an aerial and a terrestrial robot down into the sewer.

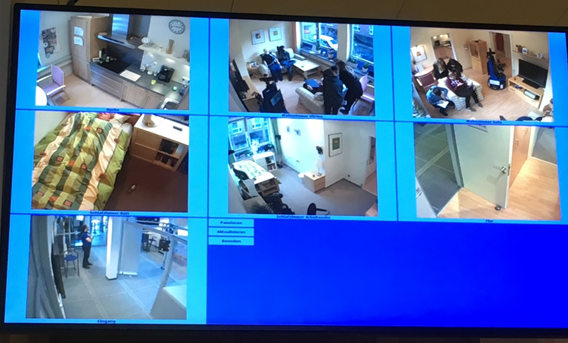
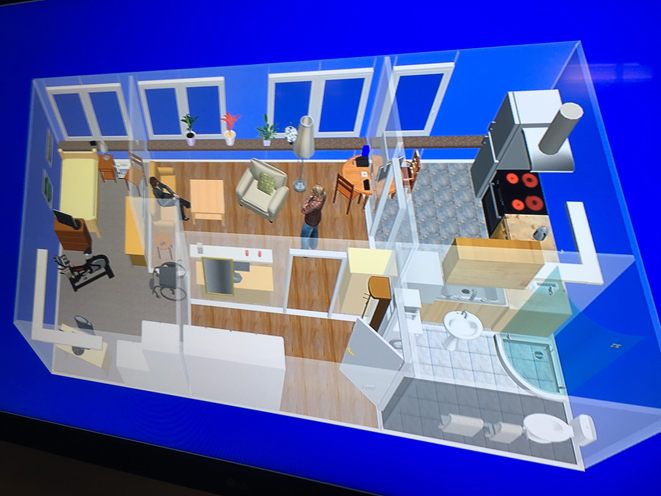
An apartment for elderly people
In the world of robotics, researchers and developers have found out that an interesting way to test and to compare how different technologies and programmers perform is through thematic competitions. The competitors are usually attended by university students and in some occasions by company employees.
For a few years now, the European Commission has funded the European Robotics League (ERL), an international organization that designs and coordinates competitions. This community decided that a good scenario would be an apartment for elderly people. The basic requirements are available space inside an enclosed facility, basic home furniture such as a dining table, a living room, a sleeping room, a few functional doors, and a few half walls of about 1.20m high to divide the different sections of the simulated apartment. Some more elaborated apartments/testbeds/living labs include a fully functional kitchen and bathroom.
Currently there are 7 ERL certified testbeds spread around the continent. This certification means that ERL competitions can be held there, nothing more. Some of these are easy to dissemble, relocate and assemble, and other ones are permanent facilities within research departments. In Oldenburg, Germany, the certified testbed has been for about 10 years a living lab for ambient assisted living. The furniture and wallpapers were selected by a panel of local elderly citizens so that it looks like an authentic apartment.
In these apartments/testbeds/living lab, commercially available robotic platforms and the teams are tested on how well they can perform in tasks such as opening a door, recognising the mailman, the deli man, or the doctor either visually or by voice command, and receiving a package or bringing the guests to the kitchen or to the main room.
A shopping mall
In the most recent ERL competition, a large testbed was ensembled inside a shopping mall in Milton Keynes, UK. This was the first time that a robot competition was conducted in such a concurred setting. The public was able to look at five scenario where different teams were competing. These included a lift (rather the doors only), a café, an office (or again, the entrance to a flat), a small warehouse with groceries, and a more abstract cage to fly an emergency kit delivery drone. In the other scenarios the tasks were to open a door, to take an order, and to request somebody to push the number of a given floor.


More analytical notes about this competition based on my work with Cian O’Donovan will be coming out soon.
What is tested, what is co-created?
Robotics living labs and testbeds can facilitate bringing together different communities of practice to learn from each other and to identify solutions to existing challenges (but who decides what the challenges to be addressed are, and how, deserves careful attention!).
In the examples presented above, robot producers have learned how hostile environment a sewer is for a robot, and how difficult it is for a robot to count how many people sit in a cafe’s table when there are other distracting faces in the surroundings.
These facilities put into test not only how the robot performs in more or less realistic environments, but also how the robotics community interacts with other social groups, such as publics and other occupations’ communities. And the other way around.
In this sense, living labs and testbeds allow the partial removal of different forms of fences that have kept different communities apart. Yet, while some fences can be partially removed, there might be others that just start to become visible. Beyond technical improvements, maybe this is one of the biggest achievements of these co-creation instruments.